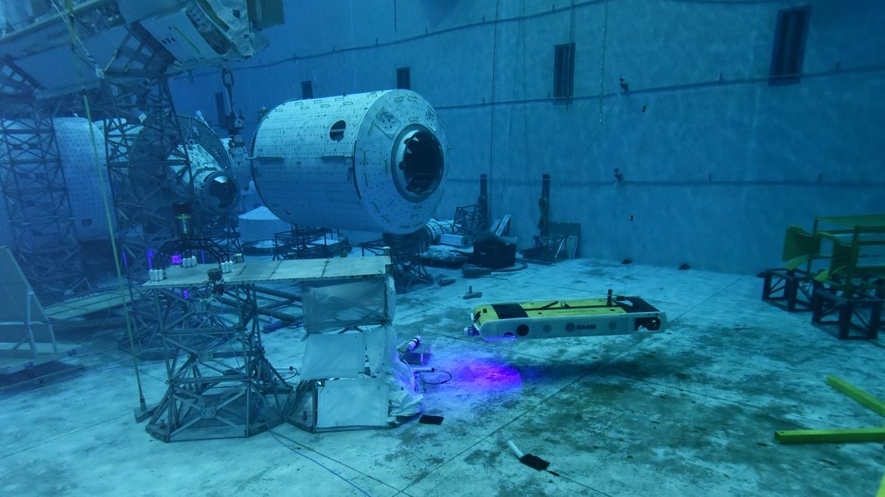
In November 2015, ECO attended a subsea industry symposium led by OneSubsea and held at NASA's Neutral Buoyancy Laboratory (NBL) at the Johnson Space Center in Houston, Texas. The symposium featured a fascinating demo of one of Saab's versatile underwater vehicles: the Seaeye Sabertooth.
The powerful Seaeye Sabertooth is a hybrid of an autonomous underwater vehicle (AUV) and an ROV. It merges Saab's Double Eagle SAROV (Saab Autonomous Remotely Operated Vehicle) with Saab Seaeye technologies. The vehicle, available in a single- and double-hull version, features long-excursion range, a six-degrees-of-freedom control system, and an operational depth of 1,200 msw (3,000 msw). It is a powerful, but lightweight and maneuverable platform, ideal for accessing complex structures and carrying out light inspection, maintenance and repair (IRM) tasks.
The demos at NBL displayed how the Seaeye Sabertooth can remotely execute subsea intervention tasks, such as closing a subsea valve. For the demo, the Sabertooth was fitted with an electric torque tool from Seanic Ocean Systems. This allowed the vehicle to operate via a free space optics (FSO) link. The link was connected to the subsea valve, where the torque tool was engaged with the torque bucket. The demo was a major success, with the vehicle able to successfully recognize various objects and navigate within a tight space with astounding precision. Visitors to the symposium watched the demo via cameras aboard the vehicle and in the testing pool. We could also watch the action by simply looking into the water from above.
These demos marked the first time an operational double-hull Seaeye Sabertooth had been demonstrated in the North America, the first time it had been operated using FSO in front of a North American audience, and the first time it had been fitted with an electric torque tool.
What I found most interesting about this technology was its ability to operate in any of three operational modes.
1) In the autonomous mode the vehicle can be instructed to perform a specific task such as transit to a specific location or to a pre-programmed inspection. The autonomous system has behavior based architecture. Navigation is supported by an Inertial Navigation System, including Internal Measurement Unit (IMU) and Doppler Velocity Log (DVL). In autonomous mode, the Seaeye Sabertooth is very well suited for survey work. Several types of sensors may be integrated and the behavior-based control system enables it to react to sensor data and autonomously interrupt a programmed mission, take additional sensor radians, and resume the mission.
2) In the operator assisted mode, the vehicle is given step-by-step instructions from an operator over an optical through-water communication link. Operations are subject to behavioral contestants such as minima distance within surroundings, minimum altitude and speed Each step is then verified by video or sonar data and sent back via the through-water communications link.
3) In the manual operator mode, the vehicle can be operated via fiber optic thither, an optical through-water communication link or a radio link, but with assistance from the INS. This mode is typically used during the final approach to a docking node or during intervention. For example, for tunnel work, and inspection may be programmed ahead of time, monitored, interrupted for extra inspections, and resumed by the operator. IN the car of fiber breakage, the pre-programmed mission is continued.
To watch a video of the demo, click here.
Through its subsidiary, Saab Seaeye, Saab manufactures electrically powered remotely operated vehicle (ROV) systems for the offshore oil and gas industry. With over 800 vehicles delivered to date, Saab Seaeye has engineered such breakthroughs as carbon fiber electronics pods, polypropylene ROV chassis, and brushless DC motor technology for ROV thrusters.
Seaeye Sabertooth Features: